COMPETENCES EXIGIBLES⚓
Démontrer l'égalité de deux vecteurs.
Utiliser la relation de Chasles dans le cas de quatre points non coplanaires.
Démontrer que deux vecteurs sont colinéaires.
Généraliser le calcul analytique de vecteurs dans l'espace.
MATERIEL⚓
Matériel de géométrie
Ordinateur
Vidéoprojecteur
RAPPEL DES PREREQUIS⚓
Vecteurs dans le plan.
Combinaison linéaire de vecteurs.
Barycentre de deux ou trois points.
Base et repère dans le plan.
Coordonnées d'un vecteur.
INTRODUCTION⚓
La technologie GPS – pour Global Positioning System– permet à des millions d’utilisateurs dans le monde entier, de bénéficier de données précises sur la localisation d’une personne ou d’un objet. Autrefois réservée aux activités militaires, le GPS et ses informations sont désormais accessibles au plus grand nombre et équipent de nombreux appareils de notre quotidien.
Le GPS est une technologie qui permet de se repérer partout dans le monde, et/ou d’obtenir les données de localisation précises d’un objet ou d’un individu, via l’utilisation d’émetteurs et de récepteurs, que sont les satellites et les objets tels que les smartphones, les GPS voitureou les traceurs GPS.
À l’origine, il s’agit d’une technologie destinée à l’armée, qui fut inventée par les Américains durant la guerre froide. Elle permettait de localiser des cibles militaires et civils et ainsi de réaliser des opérations précises, en évitant au maximum les dommages collatéraux et en frappant des points stratégiques précis, impossibles à déterminer sans l’aide de ce système GPS.
Dès 1995, ce Global Positioning System devient opérationnel pour les civils, mais la précision reste vague (environ une centaine de mètres pour la localisation), et ce n’est qu’en l’an 2000, sous la présidence de Bill Clinton, que le GPS est véritablement lancé pour les particuliers car le nombre de satellites permet enfin d’offrir la précision voulue et que la technologie a suffisamment évoluée.
En quelques années, le GPS se démocratise et on s’en sert de nos jours avec la plupart des outils de notre quotidien : smartphone, tablette, traceur, GPS de randonnée, dans les véhicules, pour surveiller un enfant ou comme GPS pour chiens et GPS pour chatsdans deux buts majeurs :
Connaître la position exacte du GPS et donc de la personne, de l’animal ou du véhicule sur lequel il est placé
Suivre un itinéraire en temps réel, avec des informations précises sur le trajet, sur les dénivelés, les virages, les reliefs, etc.
La plupart des utilisateurs se servent de cette technologie sans même connaître le fonctionnement d’un GPS.
La technologie GPS repose sur un système de triangulation, qui permet de mesurer les distances. Pour cela, il faut deux points de référence dont on connaît la distance et un troisième point : celui dont on souhaite connaitre l’emplacement.
Le fonctionnement d’un GPS repose sur trois éléments
des satellites en orbites autour de la terre, pour ce qu’on nomme le segment spatial, qui se présente sous la forme d’une constellation de 27 satellites principaux postés à environ 20 000 km de la Terre. Le nombre varie selon les opérations de contrôles et de maintenance, mais leur rôle est d’émettre un signal permanent. Les coordonnées du GPS et la vitesse sont connues et c’est l’échange d’informations entre les satellites et le récepteur au sol, qui va permettre de déterminer la position de n’importe quel élément.
Un poste de contrôle terrestre, composé de 5 stations, qui permet de vérifier le bon fonctionnement de la constellation de satellites et de traiter les données si nécessaire.
La partie utilisateurs – avec les smartphones, les systèmes de navigation, les outils topographiques – qui regroupent tous les récepteurs terrestres. Le réseau GPS est illimité (car il ne s’agit que de réception de données) et on compte près de 4 milliards de récepteurs GPS aujourd’hui.
Si le système de GPS est américain et qu’il est géré par le département de la défense américaine, d’autres systèmes de positionnements satellites ont vu le jour chez les autres puissances mondiales : la Russie a créé le système GLONASS, l’Europe a lancé le programme GALILEO, la Chine utilise le système Beidu et d’autres états mettent en place leur propre système GPS, afin de ne plus dépendre essentiellement des Etats-Unis, comme le Japon avec QZSS.
Si le GPS est un outil ultra-pratique, disposant de nombreux points forts, la technologie n’est pas encore parfaite, comme on le liste ci-dessous.
Avantages
Suivi en temps réel, pour localiser une personne ou un bien
Précision jusqu’à 5 mètres pour la localisation
Permet de planifier un trajet
Indique la route à suivre
Fonctionne dans le monde entier
Inconvénients
Un signal trop faible pour pénétrer dans les bâtiments ou les lieux trop enfouis
Des erreurs, dues à des perturbations lors de la transmission des signaux, qui ne peuvent garantir la fiabilité du système à 100 %
Définitions⚓
Définition : Vecteur
Un vecteur de l'espace est défini par une direction de l'espace, un sens et une norme (longueur).
Soient A et B deux points distincts de l’espace.
Le vecteur \(\vec{AB}\) est parfaitement déterminé par :
- sa direction : celle de la droite (AB),
- son sens : de A vers B,
- sa norme : la distance AB ou encore \(\lVert\vec{AB} \rVert\) .
Remarques :
Les vecteurs de l’espace ont les mêmes propriétés que les vecteurs du plan.
Les vecteurs de l'espace suivent les mêmes règles de construction qu'en géométrie plane : Relation de Chasles, propriétés en rapport avec la colinéarité, … restent
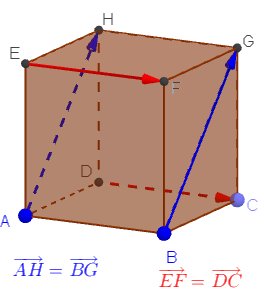
Définition : Vecteurs égaux
Soient A,B,C et D quatre points de l’espace.
Les deux vecteurs non nuls \(\vec{AB}\) et \(\vec{DC}\) sont égaux.
- si et seulement si ils ont même direction, même sens et même longueur,
- si et seulement si ABCD est un parallélogramme.
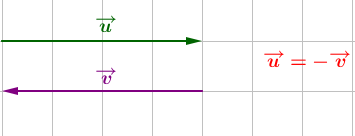
Définition : Vecteurs opposés
Soient A,B,C et D quatre points de l’espace.
Les deux vecteurs non nuls \(\vec{AB}\) et \(\vec{CD}\) sont opposés si et seulement si ils ont même direction, des sens opposés et même norme.
Les deux vecteurs \(\vec{AB}\) et \(\vec{CD}\) sont opposés si et seulement si les vecteurs \(\vec{AB}\) et \(\vec{DC}\) sont égaux.
Définition : Vecteurs coplanaires
Des vecteurs sont coplanaires si et seulement en traçant leurs représentants à partir d’un même point A, les extrémités de ces représentants sont coplanaires avec A.
Remarque : Deux vecteurs sont toujours coplanaires.
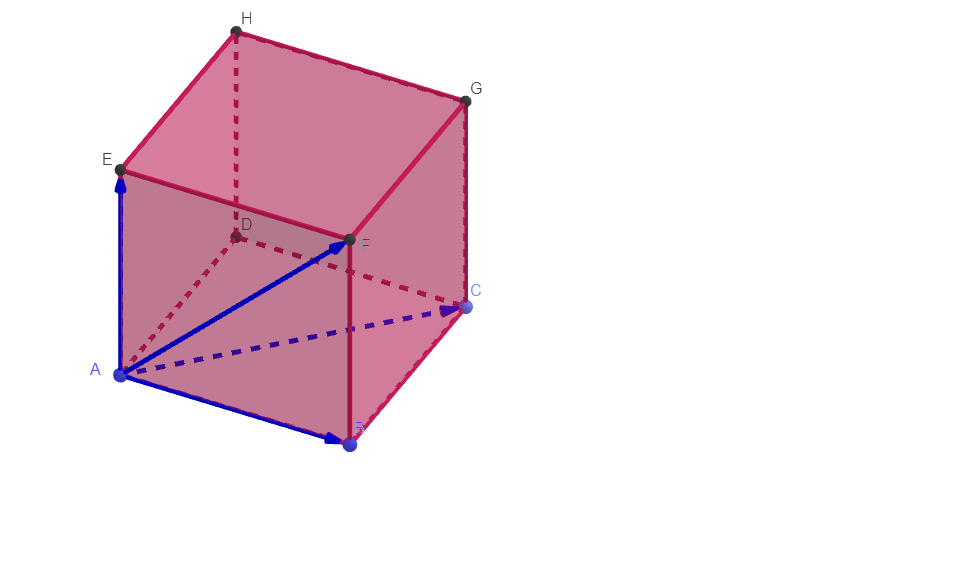
Les vecteurs \(\vec{AB}\) , \(\vec{AE}\) et \(\vec{AF}\) sont coplanaires.
Les vecteurs \(\vec{AB}\) , \(\vec{AE}\) et \(\vec{AC}\) sont non coplanaires.
Somme vectorielle⚓
Soient \(\vec u\) et \(\vec v\) deux vecteurs de l’espace.
Comme les vecteurs \(\vec u\) et \(\vec v\) sont coplanaires, on peut obtenir la somme \(\vec u +\vec v\) de ces deux vecteurs en utilisant les deux méthodes utilisées dans le plan :
- la règle du parallélogramme,
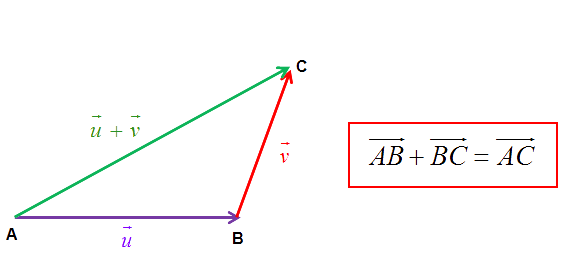
- la relation de Chasles.
Régle du parallélogramme⚓
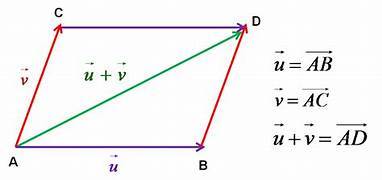
D est le point tel que ABDC est un parallélogramme.
Relation de Chasles⚓
Produit d'un vecteur par un nombre réel⚓
Soit \(\vec u\) un vecteur de l’espace et soit \(k\) un nombre réel.
On définit le vecteur \(k\vec u\) de la façon suivante :
-> Si \(k=0\) alors \(k\vec u=0\vec u =\vec 0\)
-> Si \(\vec u =\vec 0\)alors \(k\vec u=k\vec 0=\vec 0\)
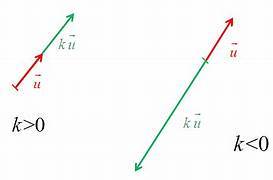
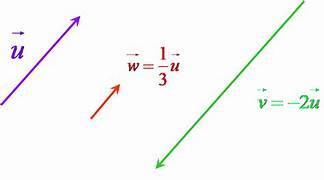
-> Si \(k\neq 0\) et \(\vec u \neq \vec 0\) alors \(k\vec u\) est le vecteur qui a :
- même direction que \(\vec u\) .
- même sens que \(\vec u\) si \(k >0\) et sens contraire à celui de \(\vec u\) si \(k\lt 0\)
pour norme celle de: \(\vec u\) multipliée par \(|k|\) : \(\lVert{k\vec u} \rVert =\vert k \rvert\lVert\vec u\rVert\) .
L’addition des vecteurs et la multiplication d’un vecteur par un nombre réel dans l’espace ont les mêmes propriétés que dans le plan.
Soient \(\vec u\) et \(\vec v\) deux vecteurs de l’espace et \(k\) et \(k’\) deux nombres réels.
Alors
\((k+k')\vec u =k\vec u +k'\vec u\)
\(k(\vec u +\vec v )=k\vec u +k\vec v\)
\(k(k'\vec u) =(kk')\vec u\)
Vecteurs colinéaires⚓
Deux vecteurs de l’espace sont colinéaires si et seulement si l’un des deux est le produit de l’autre par un nombre réel.
Deux vecteurs de l'espace \(\vec u\) et \(\vec v\) sont colinéaires si et seulement s' il existe un réel \(k\) tel que \(\vec u =k \vec v\).
Remarques :
Le vecteur nul est colinéaire à tout vecteur \(\vec u\) car \(\vec 0=0 \vec u\).
Deux vecteurs non nuls sont colinéaires si et seulement si ils ont la même direction.
Base et repère dans l'espace⚓
Définition : Base de l'espace
On appelle base de l'espace, tout triplet \((\vec u, \vec v ,\vec w)\) de vecteurs non coplanaires.
Si les vecteurs \(\vec u\), \(\vec v\) et \(\vec w\) sont deux à deux orthogonaux, on dit que la base \((\vec u, \vec v ,\vec w)\) est orthogonale.
Si les vecteurs \(\vec u\), \(\vec v\) et \(\vec w\) sont deux à deux orthogonaux et si de plus \(\lVert\vec u\rVert =\lVert\vec v\rVert =\lVert\vec w\rVert = 1\), on dit que la base \((\vec u, \vec v ,\vec w)\) est orthonormée.
Nota Bene :
Si \((\vec u, \vec v ,\vec w)\) est une base de l'espace alors pour tout vecteur \(\vec k\) de l'espace, il existe un unique triplet de réels \((a,b,c)\) tel que \(\vec k=a\vec u+b \vec v+c\vec w\).
Définition : Repère de l'espace
Un repère de l'espace est un quadruplet \((O,\vec u, \vec v ,\vec w)\) formé :
d'un point O appelé origine du repère,
d'un \((\vec i, \vec j,\vec k)\) de vecteurs non coplanaires.
Si les vecteurs \(\vec u\), \(\vec v\) et \(\vec w\) sont deux à deux orthogonaux, on dit que le repère \((O, \vec u, \vec v ,\vec w)\) est orthogonal.
Si les vecteurs \(\vec u\), \(\vec v\) et \(\vec w\) sont deux à deux orthogonaux et si de plus \(\lVert\vec u\rVert =\lVert\vec v\rVert =\lVert\vec w\rVert = 1\), on dit que le repère \((O,\vec u, \vec v ,\vec w)\) est orthonormé.
Coordonnées d'un point de l'espace⚓
Soit \((O,\vec i, \vec j,\vec k)\) un repère de l’espace. Pour tout point M de l’espace il existe un unique triplet \((x,y,z)\) de nombres réels tels que \(\vec {OM}=x\vec i+ y\vec j +z\vec k\) .
\(x\) est l'abscisse du point M, \(y\) est son ordonnée et \(z\) est sa côte. On note : \(M(x , y, z)\).
Remarque :
Si le point M a pour coordonnées \((x , y, z)\) alors \(\vec {OM}=x\vec i+ y\vec j +z\vec k\) par conséquent \(\vec {OM}\) a pour coordonnées \((x , y, z)\).
Propriétés :
Si dans un repère \((O,\vec i, \vec j,\vec k)\) ,on a : \(\vec u (x ,y,z)\) et \(\vec v(x' ,y',z')\) ,alors le vecteur \(\vec u + \vec v\) a pour coordonnées\((x+x' ,y+y' ,z+z')\).
Si dans un repère \((O,\vec i, \vec j,\vec k)\), on a : \(\vec u (x ,y,z)\) et \(k\) un réel ,alors le vecteur \(k\vec u \) a pour coordonnées\((kx ,ky ,kz)\).
Si A et B sont deux points de l’espace de coordonnées respectives \((x, y, z)\) et \((x', y', z')\) dans un repère, alors
Le vecteur \(\vec {AB}\) a pour coordonnées : \((x'-x, y'-y, z'-z)\)
Le milieu de [AB] a pour coordonnées :\((\frac{ x+x'}2, \frac{ y+y'}2,\frac{ z+z'}2)\)
Si le repère est orthonormé :\(AB=\sqrt{(x'-x)^2+(y'-y)^2+(z'-z)^2}\)