1.Mise en évidence expérimentale⚓
Consigne
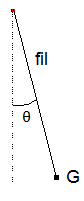
Clique sur la première vidéo et observe le mouvement du solide accroché sur le fil.
Clique sur la deuxième vidéo et observe le mouvement du solide accroché sur l"extrémité inférieure du ressort
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Question⚓
Quelles observations fais-tu sur le mouvement de chacun des solides?
Écrire la réponse dans la zone de saisie ci-dessous.
Solution⚓
Le solide attaché à l'extrémité inférieure du fil effectue un mouvement de va et vient ; son centre d'inertie décrit un arc de cercle autour de sa position d'équilibre stable (milieu de l'arc).
Le solide attaché à l'extrémité du ressort effectue un mouvement de va et vient ; son centre d'inertie décrit un segment de droite autour de sa position d'équilibre stable.(milieu du segment)
2.Définition⚓
Définition :
Le pendule simple (solide + fil) et le pendule élastique vertical (solide + ressort) sont des oscillateurs mécaniques : ils peuvent effectuer des oscillations autour de leur position d'équilibre stable.
Une oscillation est un aller et retour autour d'une position d'équilibre stable.
Lorsque le solide écarté de sa position d'équilibre, est abandonné à lui même, alors les oscillations sont dites mécaniques libres.
Lorsque la longueur du segment de droite décrit par le centre d'inertie du solide est constante, les oscillations mécaniques sont dites non amorties et l' oscillateur est appelé oscillateur harmonique.
Lorsque la longueur de l'arc de cercle décrit par le centre d'inertie du solide est constante, les oscillations mécaniques sont dites non amorties et si les oscillations sont d'une faible amplitude (l'angle maximal que fait le fil avec la verticale est inférieur à 25° ou 0,44 rad) l'oscillateur est harmonique.
Rappel⚓
Rappel :
Le centre d'inertie G du solide peut être repéré par :
son abscisse x dans le cas d'un pendule élastique vertical ou horizontal

son abscisse angulaire \(\theta\) dans le cas d'un pendule simple ou pesant
3.Équation différentielle du mouvement par la méthode dynamique⚓
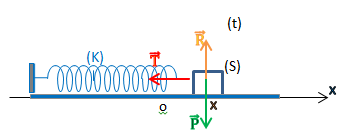
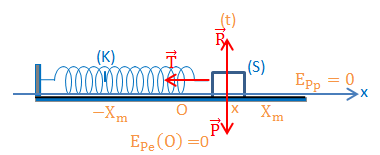
Schématisation de l'oscillateur à un instant ( t) et représentation des forces qui s'appliquent sur (S)
Théorème du centre d'inertie \(\vec P+\vec R+\vec T=m\vec a\)
Projection sur l'axe ox
- T = ma
Equation différentielle \(- k \dot{x} = m \ddot{x} \longrightarrow {m} \ddot{x}+ kx=0 \) ou \({\color{blue} \ddot{x} +\frac {k}{m}x=0}\)
4.Nature du mouvement et caractéristiques⚓
Mouvement rectiligne sinusoïdal
\({\color{black} \ddot{x} +\frac {k}{m}x=0}\)\({\color{black} \Longrightarrow x=X_mcos(w_0t + \varphi)}\)
L'abscisse x du centre d'inertie du solide est une fonction sinusoïdale du temps : les oscillations sont périodiques ; l'oscillateur est harmonique.
Caractéristiques du mouvement
\({\color{black} \ddot{x} +\frac {k}{m}x=0}\)\({\color{black} \Longrightarrow x=X_mcos(w_0 + \varphi)}\)\(\)
Amplitude des oscillations :\(X_m\)
Phase à la date t=0 : \(\varphi\)
Pulsation propre de l'oscillateur \(w_{0}=\sqrt{\frac{k}{m}}\)
Période propre de l'oscillateur \(T_{0}=\frac{2\pi}{w_{0}}=2\pi\sqrt{\frac{m}{k}}\)
Fréquence propre de l'oscillateur \(N_{0}=\frac{w_{0}}{2\pi}=\frac{1}{2\pi}\sqrt{\frac{k}{m}}\)
Complément : Détermination de l'amplitude, de la pulsation propre et de la phase à l'origine
Les constantes \(X_m\), \(w_0\) et \(\varphi\) peuvent être déterminées à partir des conditions initiales.
5.Énergie mécanique de l'oscillateur⚓
Expression
Référence énergie potentielle de pesanteur (\(E_{pp})\)) : Surface de la table
Référence énergie potentielle élastique (\(E_{pe}\)) : position d'équilibre stable (O)
Energie potentielle du système : \(E_p = E_{pe}\)
A un instant donné, l'énergie mécanique de l'oscillateur s'écrit \(E=E_c + E_p = \frac{1}{2}m\dot{x}^2 +\frac{1}{2}kx^2\)
Conservation de l'énergie mécanique
\(E = \frac{1}{2}m\dot{x}^2 +\frac{1}{2}kx^2\)
\(x = X_m cos(w_0t + \varphi)\) et \(\dot{x}=- X_mw_0sin(wt + \varphi)\)
\(E = \frac{1}{2}m (-X_mw_0sin(w_0t + \varphi))^2 + \frac{1}{2}k(X_mcos(w_0t + \varphi))^2\)
\(w_0=\sqrt{\frac{k}{m}} \longrightarrow mw_0^2=k\)
\(E=\frac{1}{2}kX_m^2sin^2(w_0t + \varphi) + \frac{1}{2}kX_m^2cos^2(w_0t +\varphi)\)
\(E= \frac{1}{2}kX_m^2 ((sin^2(w_0t + \varphi) +cos^2 (w_0t +\varphi))\)
\(E=\frac{1}{2}kX_m^2=\frac{1}{2}mw_0^2X_m^2=\frac{1}{2}mV_m^2\) avec \(V_m =X_mw_0\)
L'énergie mécanique est constante : le système est conservatif.
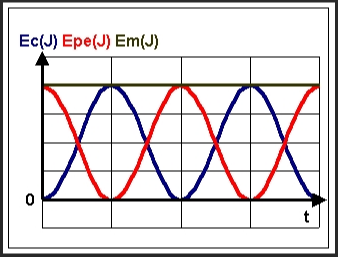
Diagrammes temporels des énergies cinétique, potentielle et mécanique
Exemple : \(x=X_mcosw_0t\)
\(E_p=\frac{1}{2}kx^2=\frac{1}{2}kX_m^2cos^2w_0t\)
\(\color{red}E_p =\frac{1}{4}kX_m^2(1+cos2w_0t)\)
\(E_c=\frac{1}{2}m\dot{x}^2=\frac{1}{2}mw_0^2X_m^2sin^2w_0t\)
\(\color{blue}E_c=\frac{1}{4}kX_m^2(1-cos2w_0t)\)
\(\color{black}E=\frac{1}{2}kX_m^2\)
Les énergies cinétique et potentielle sont périodiques de pulsation \(w =2w_0\) et de période \(T=\frac{2\pi}{w}=\frac{\pi}{w_0}=\frac{T_0}{2}\)
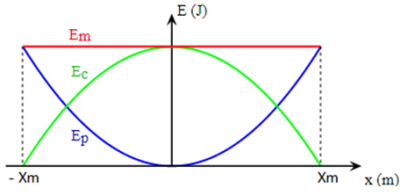
Variation des énergies cinétique, potentielle et mécanique en fonction de l'abscisse x
\(\color{red}E_m = \frac{1}{2}kX_m^2\)
\(\color{blue}E_p=\frac{1}{2}kx^2\) avec\( x\in[-X_m, +X_m]\)
\(\color{green}E_c=E_m-E_p=\frac{1}{2}k(X_m^2-x^2)\)
6.Applications⚓
Application 1 : amplitude et période
Application 2 : Equation horaire traduisant les oscillations d'un solide
Question⚓
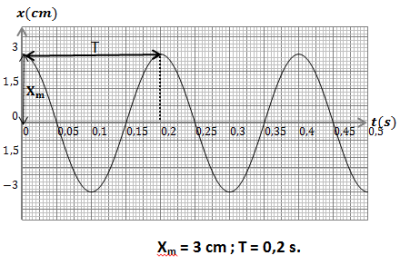
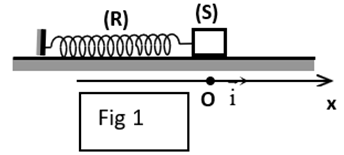
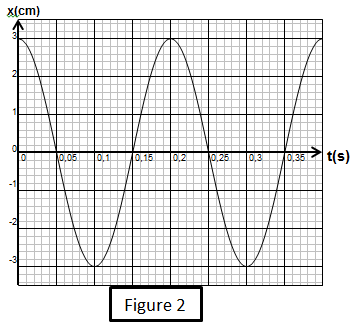
A l'aide d'un dispositif approprié,on a enregistré l'élongation en fonction du temps (x = f(t)) du mouvement d'un solide (S) attaché à l'une des extrémités d'un ressort horizontal (fig 1); on a trouvé le graphe de la figure 2.
Après avoir déterminé l'amplitude \(X_m\), la période \(T_0\) et la phase à la date 0 \(\varphi\), déduire l'équation horaire du mouvement.
Solution⚓
\(\color{blue}{X_m =3 cm}\) et \(\color{blue}{T_0 = 0,2 s}\) (voir figure )
\(x=X_mcos(w_0t+\varphi)\)
D'après graphe, à t=0 \(x_0=X_m=3 cm\)
D'autre part \(x_0=X_mcos\varphi\)
\(\Longrightarrow X_mcos\varphi=X_m \Longrightarrow cos\varphi=1\)soit donc \(\color{blue}{\varphi= 0}\)
L'équation horaire s'écrit alors :
\(\color{blue}{x=3.10^{-2}cos10\pi t}\)
Application 3 : Equation différentielle et détermination constante de raideur
Question⚓
On réalise un pendule élastique horizontal à l'aide d'un ressort de raideur k et d'un solide S de masse m qui peut se déplacer sans frottement sur une table à coussin d'air horizontale. On écarte le solide S d'une distance \(X_0\) par rapport à sa position d'équilibre et on le lâche sans vitesse initiale.
1. Etablir l'équation différentielle du mouvement par la méthode énergétique.En déduire la nature du mouvement de S.
2. L'étude expérimentale du mouvement montre 25 oscillations du solide durent 8,1 s. Sachant que la masse du solide vaut m = 200 g, en déduire la valeur de k.
Solution⚓
1. Equation différentielle du mouvement
Le solide n'est pas soumis à des frottements ; l'énergie mécanique se conserve (\(\frac{dE}{dt}=0\))
\(E=\frac{1}{2}m\dot{x}^2+\frac{1}{2}kx^2\)
\(\Longrightarrow \frac{dE}{dt}= m\dot{x}\ddot{x}+kx\dot{x}=0\)
\(\Longrightarrow \dot{x}(m\ddot{x}+kx)=0\)
Etat de mouvement \(\dot{x}\ne 0\)
\(\Longrightarrow m\ddot{x}+kx=0\)
ou \(\color{blue}{\ddot{x}+\frac{k}{m}x=0}\)
Le mouvement est rectiligne sinusoïdal
2.Valeur de la constante de raideur k
\(T_0=2\pi \sqrt{\frac{m}{k}}\) et \(T_0=\frac{\Delta t}{n}\)
\(\Longrightarrow 2\pi \sqrt{\frac{m}{k}}=\frac{\Delta t}{n}\)
\(\Longrightarrow k=4\pi^2m(\frac{n}{\Delta t})^2\)
\(k=4\pi^2\times 0,2\times (\frac{25}{8,1})^2=75 N.m^{-1}\)